控制器的控制方法
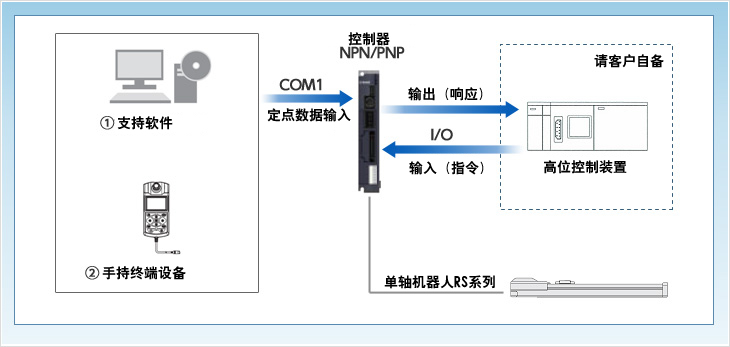
I/O控制(适用控制器:NPN、PNP)
所谓I/O控制,是指通过Input(输入)/Output(输出)进行控制。
MISUMI单轴机器人的输入输出规格有Input 16点、Output 16点,共计32点I/O端子。
各输入输出端子的功能,请参阅产品目录上刊载的I/O连接器信号功能说明。
例如,在PLC的I/O单元和RS单轴机器人控制器(NPN/PNP规格时)上安装I/O电缆。
再编制程序(梯形图)。
根据连接在PLC的I/O单元上的输入输出设备的ON/OFF状态,由PLC的I/O单元输出程序运行的结果。
基于并行通信的I/O控制
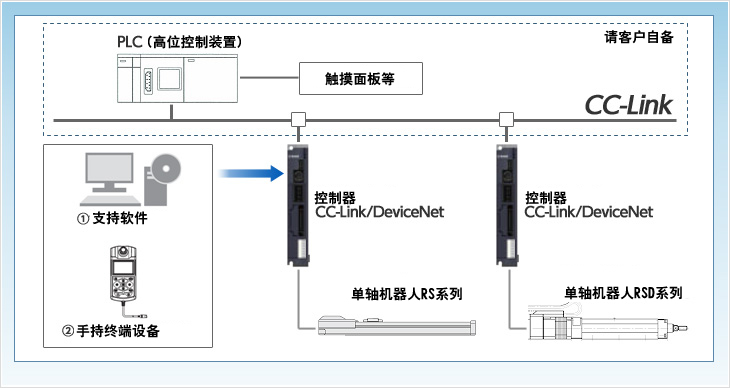
远程指令控制(适用控制器:CC-Link)
使用适应现场网络规格的机器人控制器(CC-Link),以1台PLC为主站,以温度调节器、定时器、计数器、阀门、图像处理装置、条形码扫描仪等各种I/O设备和检测仪器作为从站,并进行适当连接。
于是,可进行1对N的通信。
※为了设定站号,需要手持终端设备和支持软件。
通过CC-Link现场网络进行控制(远程指令控制)
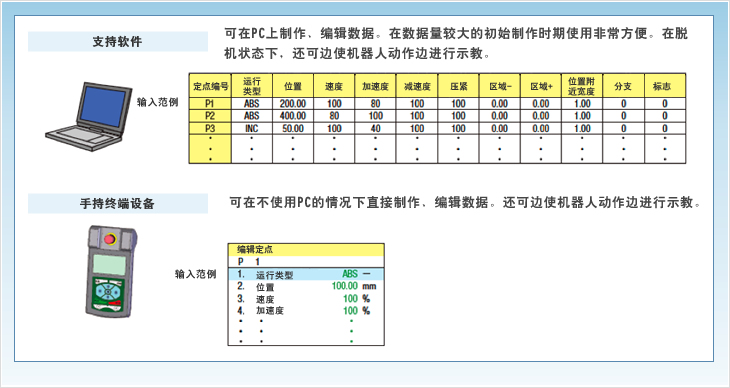
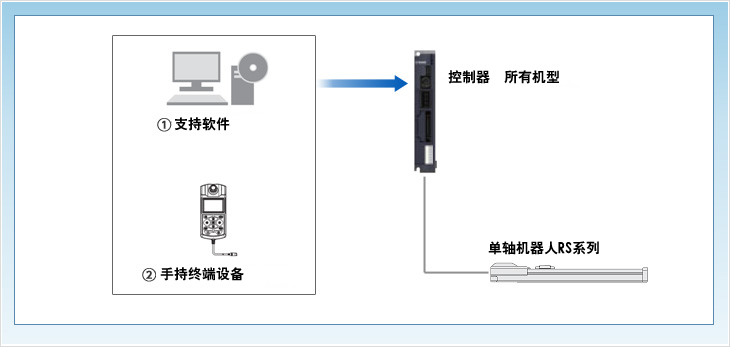
通过手持终端设备和支持软件进行简易运行(适用控制器:所有机型)
手持终端设备可以无需PLC、PC等特殊设备,而驱动单轴机器人。
需要维护时,能方便地携带到各个现场,对单轴机器人进行调整。
支持软件虽然需要PC机,如表格计算软件Excel那样,也仅需将数据输入表格,即可轻松运行。
数据构成和数据输入方法,请参阅下列图表。
简易运行
数据构造
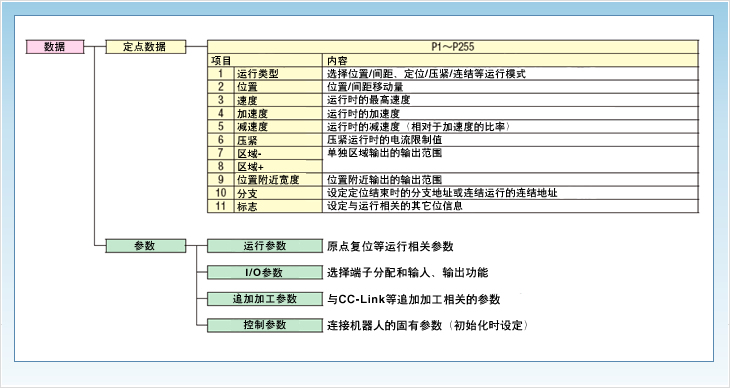
数据输入方法